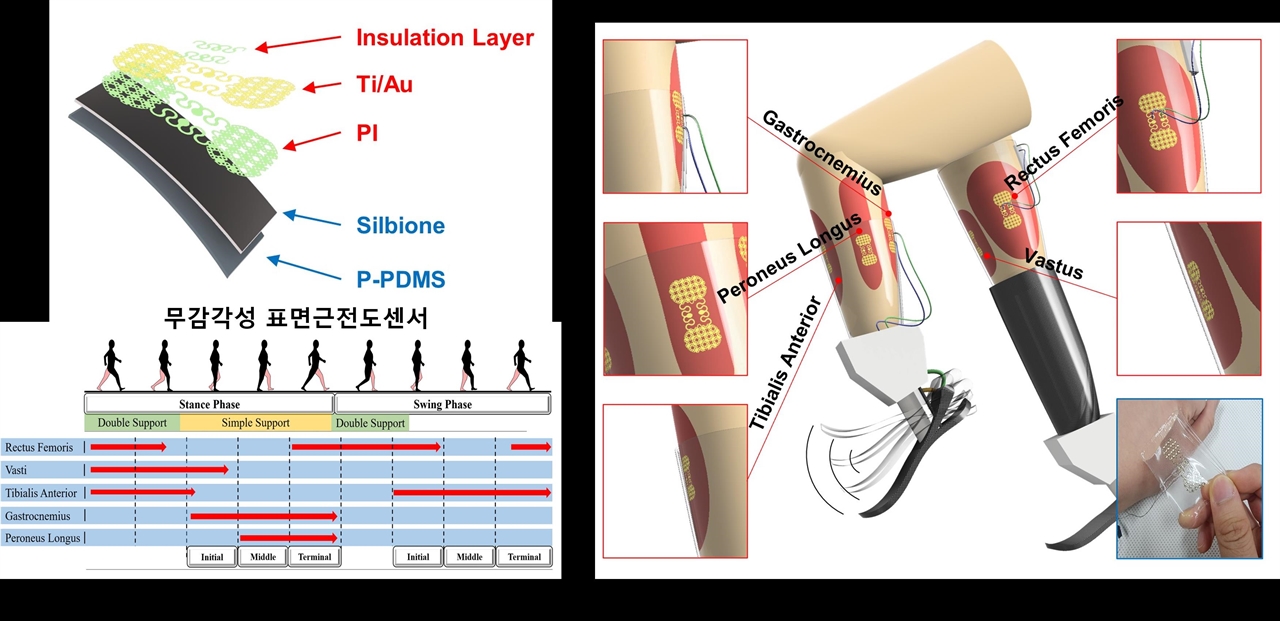
▲무감각성 표면근전도센서의 모식도무감각성 표면근전도센서의 개략도. 무감각성 표면근전도센서 형성을 위해 미세전자제어기술 (MEMS) 을 활용하였고, 생체적합성 실리콘 점착물질을 기판으로 사용하여 목표 부위에 쉽게 안정적으로 고정시킬 수 있으며 전기화학적 성능이 뛰어난 금을 피부와 긴밀하게 접촉시킴으로써 고품질의 근육 신호를 감지할 수 있다. 보행을 관장하는 다양한 근육 부위에 부착된 무감각성 표면근전도센서의 이미지. ⓒ DGIST 제공
잃어버린 다리를 로봇으로 대체하는 '바이오닉 하지 기술'이 개발되고 있는 가운데 하지절단 환자의 의도에 맞게 로봇 의족을 제어할 수 있는 신기술로 '무감각성(imperceptive) 표면 근전도 센서(sEMG, Surface Electromyography Sensor)'가 국내 연구진에 의해 개발됐다.
이번 신기술 개발로 사고에 의한 하지절단뿐만 아니라 당뇨와 같은 성인병이 증가하면서 당뇨로 하지절단 환자 수가 급증하는 상황에서 환자 삶의 질 향상에 크게 기여할 것으로 기대된다.
▲관련 사진 2. DGIST 이상훈 교수팀이 연구 내용을 논의하고 있다. ⓒ DGIST 제공
DGIST(대구경북과학기술원, 총장 국양)는 8일 "로봇및기계전자공학과 이상훈 교수팀이 미세 전자 제어 기술(Microelectro Mechanical System)을 통해 형성되는 생체인터페이스인 '무감각성 표면 근전도 센서'를 개발했다"고 밝혔다.
그동안 '로봇 의족' 개발을 위해 가장 중요한 사항은 절단 환자의 의도에 맞게 하지 기능이 안정적으로 구현돼야 한다는 점이었다. 무엇보다 환자의 생체 신호를 신속하고 정확하게 획득할 수 있어야 했다.
일반적으로 환자의 생체 신호를 획득하는 가장 적합한 방법으로 '비침습적인 표면 근전도 센서'를 활용하는 방법이 있지만, 실제로 활용하기는 어려웠다고 한다. 그 이유는 근전도 신호 기록을 위해서는 센서가 소켓 내부 실리콘 라이너 안에 위치해야 하는데, 실리콘 라이너의 매우 좁고 습한 환경, 그리고 로봇 의족의 무게와 함께 역동적인 움직임이 강하게 전달되는 소켓의 영향으로 센서의 손상 없이 장기간 동안 근육의 생체 신호를 안정적으로 기록할 수 없기 때문이다.
이에 이상훈 교수 연구팀이 개발한 '무감각성 표면 근전도 센서'는 서펜타인 구조(뱀 같이 구불구불한 구조)를 모방해 유연성과 신축성을 지님과 동시에 통기성과 접착성을 확보하고 다양한 절단환자의 환부에 적용했다. 그 결과로 장기간 반복적으로 사용할 수 있었으며, 또한 무선 모듈과 결합해 로봇 의지(義肢 : 인공으로 만든 팔과 다리. 의수(義手) 및 의족(義足)을 뜻함)와 소켓, 실리콘 라이너를 착용한 상태로 보행 시 발생하는 실시간 신호를 확보했다.
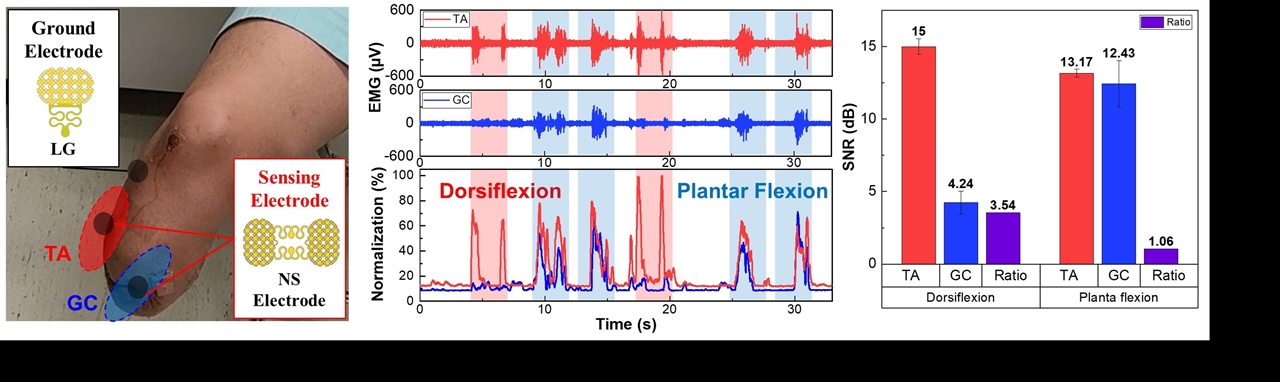
▲무감각성 표면근전도센서를 통한 근육 신호 획득무감각성 표면근전도센서의 근육 신호 획득 성능 검증을 위해 하퇴 절단환자의 절단부에 무감각성 표면근선도센서를 부착하였다. 환자의 발바닥쪽굽힘 (plantar flexion) 운동과 발등굽힘 (dorsiflexion) 운동 사이에서 발생한 근육 신호분석을 통해 소자의 성능을 검증하였다. ⓒ DGIST 제공
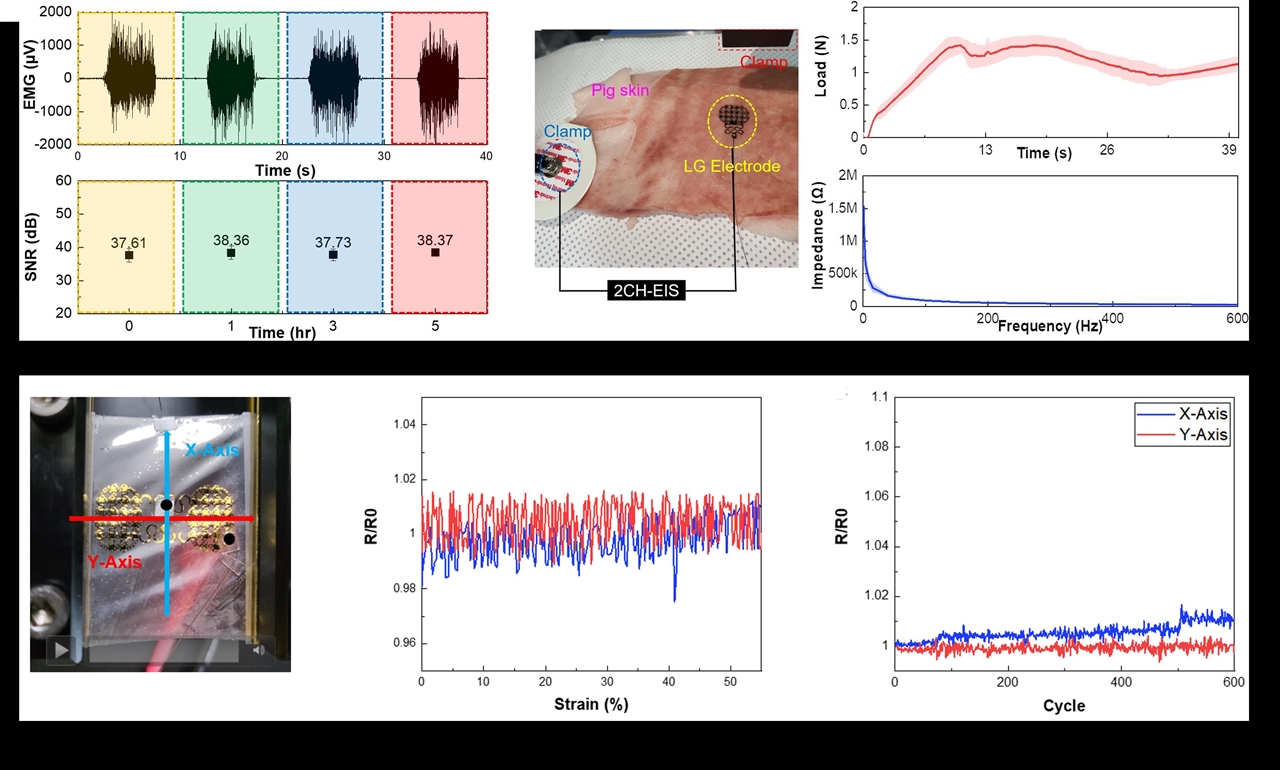
▲무감각성 표면근전도센서의 장시간 안정성 평가.무감각성 표면근전도센서의 기계적·전기적 성능 평가를 통해 장시간 안정적인 신호 획득에 대해 입증하였으며, 무감각성 표면근전도센서의 반복 가능성에 대한 잠재력도 입증하였다. 무감각성 표면근전도센서의 내구성 및 신호 획득 능력은 가혹한 소켓 내부의 조건에서도 근육 신호를 획득 할 수 있음을 확인하였다. ⓒ DGIST 제공
특히 이상훈 교수 연구팀은 검증을 위해 절단환자에게 '무감각성 표면 근전도센서'를 부착한 후 근육 신호 기록을 통한 소자의 기능성 평가를 진행했다.
그 결과로 평지와 경사면, 계단 등 다양한 환경에서 보행하는 절단환자의 근육 신호를 고품질로 실시간 획득에 성공했으며, 이를 무선 전송해 로봇 의족에 내장된 동작 분석 센서를 통해 환자의 보행 보조가 가능함도 검증해냈다.
또한 연구팀은 절단 환자의 발바닥쪽굽힘 운동(plantar flexion)과 발등굽힘 운동(dorsiflexion)에서 발생한 근육 신호를 분석해 무감각성 표면 근전도 센서의 선택적 신호 획득성능이 상업용 표면 근전도 센서보다 뛰어남을 확인하기까지 했다.
나아가 연구팀은 신체 신호를 활용한 로봇 의족 및 로봇 의수의 정밀 제어 외에도 다양한 '웨어러블 응용 기술'에도 활용될 수 있을 것으로 기대하고 있다.
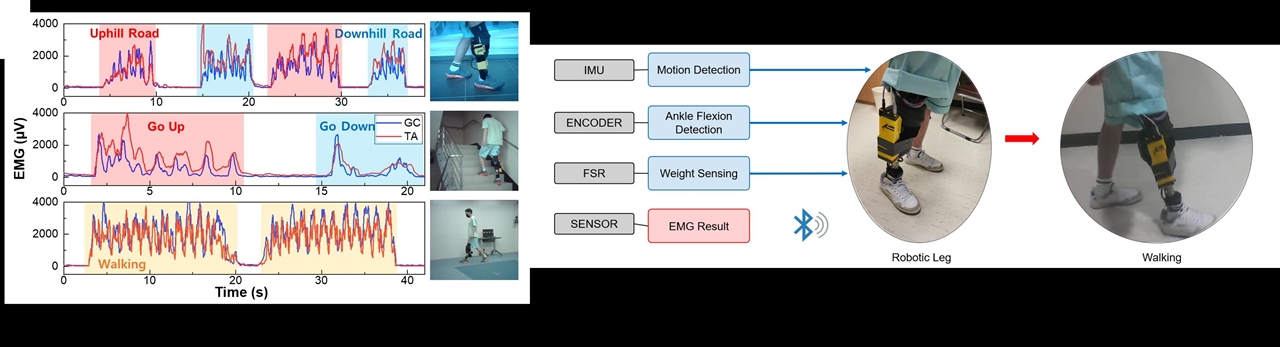
▲평지, 경사, 계단에서의 보행 신호 획득 및 바이오닉 하지의지 구동부착된 무감각성 표면근전도센서를 통한 근육 신호 획득을 위해서 환자는 다양한 환경(평지, 경사, 계단)에서 보행하였다. 실제 보행 신호는 실시간으로 무선 시스템을 통하여 획득이 가능함을 입증하였으며, 바이오닉 하지의지에 실시간으로 측정된 근육 신호를 활용하여 구동함을 보였다. ⓒ DGIST 제공
DGIST는 "이번에 연구팀이 개발한 센서는 하지 절단환자의 의도에 맞게 로봇 의족을 제어할 수 있는 중요 장치"라며 "향후 절단환자의 의도를 반영한 로봇 의족 구동을 통해 재활 및 삶의 질 향상에 크게 기여할 것"이라고 기대했다.
이상훈 교수는 "해외뿐만 아니라 국내에도 생각보다 절단 환자가 많지만, 사용자의 의지가 반영되어 제어가 가능한 의족이 없어 일상생활에 제한이 많은 것으로 알고 있다"면서 "이번 연구 결과를 바탕으로 연구에 더욱 매진하여 향후 인체의 사지와 같은 감각과 운동 기능이 구현 가능한 바이오닉 사지(Bionic limbs)를 개발하여 절단 환자들도 모든 일상생활을 누릴 수 있게 만들고 싶다"고 전했다.

▲(왼쪽부터) DGIST 로봇및기계전자공학과 이상훈 교수, 박재우 석박사통합과정생. ⓒ DGIST 제공
한편, 이번 연구는 범부처전주기의료기기개발사업단의 '양측 하지 절단환자 적용 가능한 스마트 전자제어식 하지의지 제품 및 핵심부품 국산화 개발' 과제의 지원을 통해 서울아산병원 성형외과팀, 휴고다이나믹스, DGIST가 공동 연구를 수행했다. 연구 결과는 재료과학 및 융합연구 분야의 우수 학술지인 <npj Flexible Electronics(JCR IF 14.6, 분야 상위 2%)>에 10월 25일 게재됐다.
앞서 이상훈 교수 연구팀은 절단환자의 신체와 로봇 팔·다리가 양방향 커뮤니케이션을 안정적으로 일체화해 이뤄지도록 하게 하는 생체 인터페이싱 신기술로 '하이브리드 바이오닉 신경인터페이스'를 개발한 바 있다(관련 기사 :
절단환자 위한 로봇 팔·다리 정밀 제어 '생체인터페이스' 개발 https://omn.kr/265tw ).